Wheel Chair Controlling Without Hand
Objective
The main objective of this project is to design for handicapped people just with the tilt of his/her hand they are able to move from one place to other without taking any help.
Abstract
According to a research there are about 6 million populations in the world who are paralysed and needs a wheelchair for their mobility. Earlier the wheel chairs had to be moved and be externally supported by any person. To help overcome this “joystick-controlled wheelchairs” are developed. But in regular use, these joystick-controlled wheelchairs became difficult to use. Especially in the case of paralysed people, the use of joystick became more difficult due to the hard buttons and unidirectional use of the joysticks. To overcome these problems, we’ve tried to develop a “gesture-controlled wheelchair” which can be moved with a slight tilt of the hand. This can be used in both hands and can be controlled to come to the user from a distance.
An accelerometer is used as a sensor which gives an analog signal on its movement in any of the 6 axis directions, that is positive X axis, negative X axis, positive Y axis, negative Y axis, positive Z axis, negative Z axis. In this project we have considered X and Y axis for the direction. Further the input from sensor is given to encoder which sends the data wirelessly through the transmitter, then the data is received at the receiver end and the sensor data is decoded and finally given to microcontroller. Based on data received the from accelerometer the microcontroller sends the signal accordingly to relays to move the wheelchair in forward, backward, left, right directions. The accelerometer used here is MEMS (micro-electromechanical system).
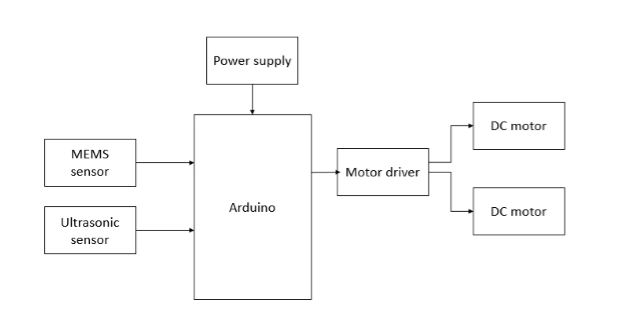
Keywords: Arduino uno, Ultrasonic sensor, MEMS sensor, Motor driver, DC motor, power supply
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware Requirements:
- Arduino UNO
- MEMS sensor
- Ultrasonic sensor
- Motor driver and DC motor
- power supply Board
- Battery
Software Requirements:
- Arduino IDE
- Fritzing
Learning Outcomes
- Arduino pin diagram and architecture
- How to install Arduino IDE software
- Setting up and installation procedure for Arduino
- Introduction to Arduino IDE
- Basic coding in Arduino IDE
- Working of Ultrasonic sensor
- Interface Ultrasonic sensor with Arduino?
- Working of MEMS sensor
- Interface MEMS sensor with Arduino?
- Working of Motor driver and DC motor
- Interface Motor driver and DC motor with Arduino?
- Working of power supply
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.