Variable Speed Operation of Brushless Doubly-Fed Reluctance Machine Drive using Model Predictive Current Control Technique
Objective
The main objective of this project is to avoid the hectic tuning of PI controller gains, increase bandwidth of operating regions and improve the dynamic and steady state performance of the drive system.
Abstract
In this project, to accomplish an accurate and fast drive control, Model Predictive Control (MPC) is considered as an effective control strategy nowadays. In MPC, the voltage vectors required for inverter control are evaluated considering the control objectives defined in terms of current or power or torque and flux.
The optimal one is selected using an iterative prediction loop and applied in next control interval. This form of MPC is simple in implementation and shows appreciable dynamic performance but the steady state performance is compromised due to the limited availability of number of voltage vectors, especially in case of two-level voltage-source-inverter.
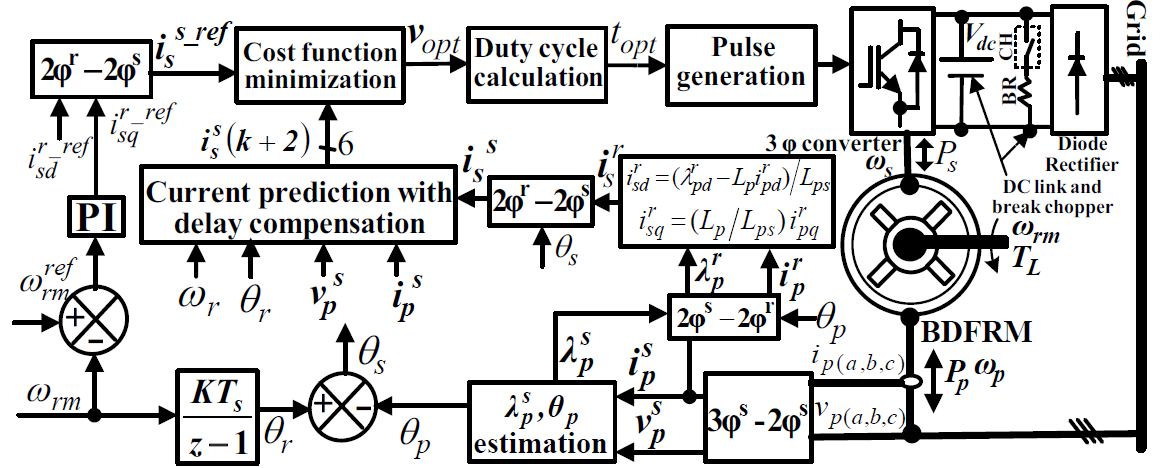
The present article explores the viability of MPC approach for a new device like brushless doubly-fed reluctance machine drive considering its secondary current as the control variable. Moreover, to tackle the steady-state inferiority issue, the duty-cycle control concept is inducted.
In comparison to Field Oriented Control (FOC), the proposed scheme offers straightforward solution for current control by replacing the inner current Proportional-Integral (PI) controllers and pulse-width modulator with an optimization-based model predictive current controller. The proposed system is simulated in MATLAB/Simulink.
Keywords: Field Oriented Control (FOC), Model Predictive Control (MPC), Direct Torque Control (DTC), Direct Power Control (DPC).
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Software Configuration:
Operating System : Windows 7/8/10
Application Software : Matlab/Simulink
Hardware Configuration:
RAM : 8 GB / 4 GB (Min)
Processor : I3 / I5(Mostly prefer)
Learning Outcomes
- Introduction to Matlab/Simulink
- What is EISPACK & LINPACK
- How to start with MATLAB
- About Matlab language
- About tools & libraries
- Application of Matlab/Simulink
- About Matlab desktop
- Features of Matlab/Simulink
- Basics on Matlab/Simulink
- Introduction to Brushless Doubly-Fed Reluctance Machine.
- Study of different motors.
- Design of BDFRM.
- Introduction to electrical drives.
- Analysis of power converters.
- Modelling of MPC.
- Introduction to controller.
- We can learn about Synchronous reference frame theory.
- We can learn about Clark’s transformation.
- Design of PI controller.
- Introduction to the types of filters.
- Introduction to closed loop, open loop control methods.
- Introduction to different variable speed strategies.
- Design of PWM techniques.
- Design of FOC strategy.
- Design of space vector Pulse width modulation.
- Introduction to different variable speed strategies.
- Project Development Skills:
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills
Demo Video

Request for Video
Related Projects
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.