To Create a Robotic Humanoid Hand Imitating the Real Time Motions of a Human User’s Hand
Also Available Domains Arduino|Robotics|Embedded applications
Abstract
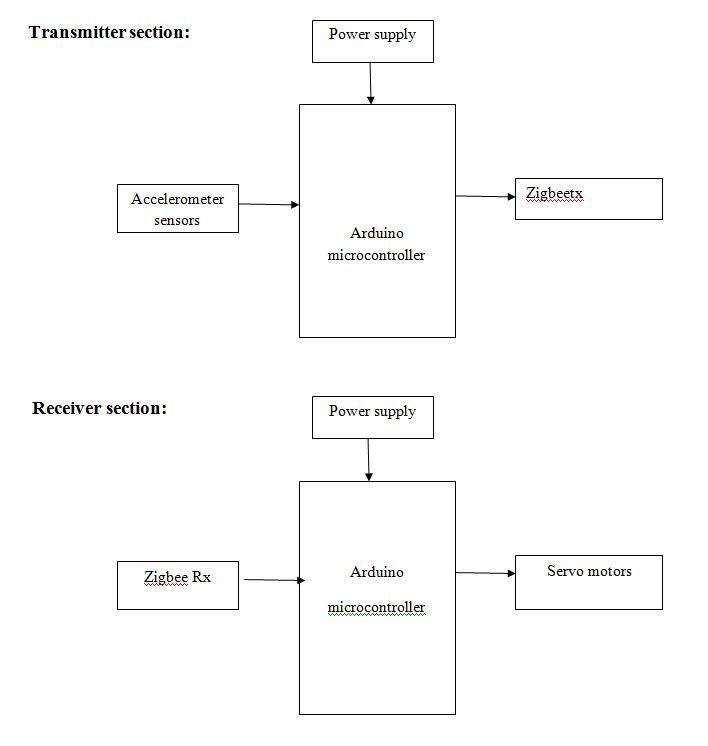
In this paper, a 3D printed robotic humanoid hand is created to mimic a human user’s hand motions in a real timemanner. First, the motions of the human hand are captured by accelerometer sensor and are extracted. Then the gesture of the user hand is passed to an Arduino microcontroller through a serial communication interface. Finally, the microcontroller sends the controlcommands to the servomotors of the robotic hand to implementthe required gesture. The testing results show that the robotichand meets the design requirements.In this paper, a 3D printed robotic hand is created and presented, which is capable of emulating the grasping motionof a human hand and mimicking basic human hand motions inthe real time manner.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.