Smart Robots For Collision Avoidance Using Neural Networks
Also Available Domains Arduino|ARM7|Raspberry pi
Objective
The main objective of this project is to avoid accidents and collisions, where it works spontaneously when any obstacle or any vehicle comes near to another vehicle and it controls the speed of the vehicle.
Abstract
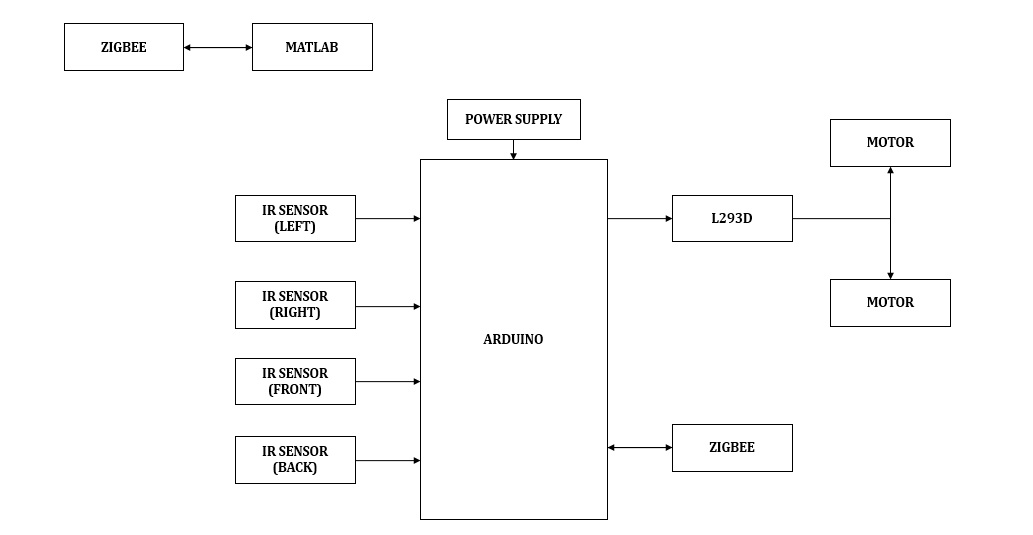
Now a days, accidents on roads are caused due to the negligence of drivers and pedestrians or due to unexpected obstacles that come into the vehicle’s path. In this project, a model (robot) is developed to assist drivers for a smooth travel without accidents. It reacts to the real time obstacles on the four critical sides of the vehicle and takes necessary action. The sensor used for detecting the obstacle was an IR proximity sensor. A single layer perceptron neural network is used to train and test all possible combinations of sensors result by using Matlab (offline). Arduino is used to control the vehicle through the output data which is received from Matlab via serial communication. Hence, the vehicle becomes capable of reacting to any combination of real time obstacles. Here we are using Zigbee for serial communication.
Keywords: IR sensor, zigbee, arduino, motor.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware Requirements:
- Arduino uno
- 5v Power supply
- IR sensors
- DC Motor
- L293D Motor driver
- Zigbee
Software Requirements:
- Arduino IDE
- Embedded C
- Fritzing
- Matlab
Learning Outcomes
- Arduino Pin diagram
- Arduino Architecture
- How to install Arduino Software
- How to install Matlab Software
- Working of IR sensor
- How to interface IR sensor with Arduino?
- Introduction to serial communication
- Working of zigbee module
- How to interface zigbee with Arduino?
- Working of L293D Motor driver and dc motor
- How to interface L293D Motor driver and dc motor with Arduino?
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools. ,
- Solution providing for real time problems,
- Working with team/ individual,
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.