Real-Time Vehicle Detection from UAV Aerial Images
Objective
The objective of this project is to develop a robust and efficient model for real-time vehicle detection from UAV-captured aerial images, focusing on accuracy across diverse scales and complex urban settings. By integrating an additional prediction head, the model enhances its ability to detect smaller vehicles. To improve feature fusion across multiple scales, a Bidirectional Feature Pyramid Network (BiFPN) is employed, preserving crucial spatial details during training. Additionally, Soft Non-Maximum Suppression (Soft-NMS) is utilized to reduce detection errors caused by closely aligned vehicles. This system aims to support real-time applications in traffic management, urban planning, and emergency response.
Abstract
Real-Time Vehicle Detection from UAV Aerial Images
ABSTRACT
The rapid advancement in Unmanned Aerial Vehicle (UAV) technology has created new opportunities for real-time monitoring and detection applications, particularly in vehicle detection from aerial imagery. This study presents a robust real-time vehicle detection model, built on YOLOv5, specifically designed for UAV-acquired images and leveraging the VisDrone2019 dataset, which includes annotated categories of cars, vans, trucks, and buses. YOLOv5 serves as the base model, optimized for high-speed processing, and several key enhancements are introduced to improve detection accuracy and performance in complex aerial scenes. An additional prediction head is integrated into YOLOv5 to enhance detection capabilities for smaller-scale objects, addressing challenges in identifying vehicles from high altitudes or dense environments. To retain essential feature information throughout the training process, a Bidirectional Feature Pyramid Network (BiFPN) is employed, enabling efficient feature fusion across multiple scales. Furthermore, Soft Non-Maximum Suppression (Soft-NMS) is utilized as a frame filtering technique, mitigating missed detections by handling cases where vehicles are closely aligned. This combination of YOLOv5 and advanced techniques enables high accuracy in real-time vehicle detection, making it suitable for applications in traffic monitoring, urban planning, and emergency response.
Keywords: Real-time vehicle detection, UAV, YOLOv5, VisDrone2019 dataset, small-scale object detection, Bidirectional Feature Pyramid Network (BiFPN), Soft-NMS, aerial imagery, traffic monitoring.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
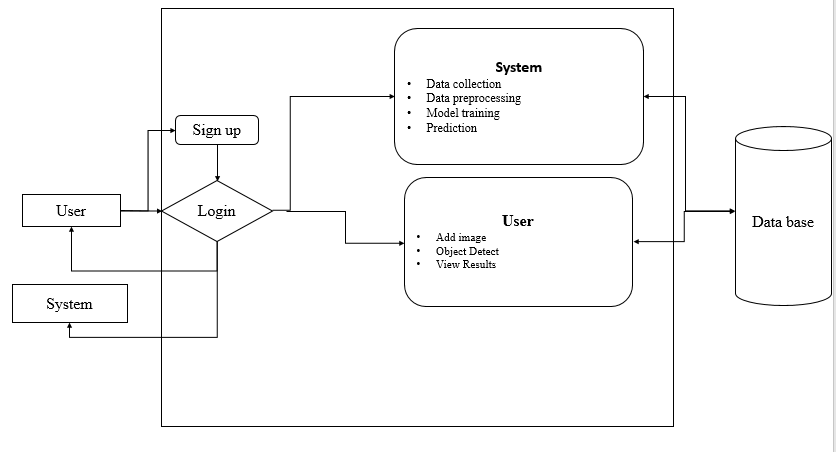
Block Diagram
Specifications
HARDWARE AND SOFTWARE REQUIREMENTS
Hardware Requirements
Processor - I7/Intel Processor
Hard Disk - 160GB
Key Board - Standard Windows Keyboard
Mouse - Two or Three Button Mouse
Monitor - SVGA
RAM - 8GB
Software Requirements:
Operating System : Windows 11
Server side Script : HTML, CSS, Bootstrap & JS
Programming Language : Python
Libraries : Flask, Pandas, Mysql.connector, Os, Smtplib, Numpy
IDE/Workbench : PyCharm
Technology : Python 3.6+




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.