Real-Time Intersection-Based Segment Aware Routing Algorithm for Urban Vehicular Networks
Objective
The objective of this project is to present a real-time intersection-based segment aware routing (RTISAR), an intersection-based segment aware algorithm for geographic routing in VANETs. This routing algorithm provides an optimal route for forwarding the data packets toward their destination by considering the traffic segment status when choosing the next intersection.
Abstract
In the real-time intersection based segment aware routing algorithm project is about wireless network technologies research. High vehicular mobility causes frequent changes in the density of vehicles, discontinuity in inter-vehicle communication, and constraints for routing protocols in vehicular ad hoc networks (VANETs). The routing must avoid forwarding packets through segments with low network density and high scale of network disconnections that may result in packet loss, delays, and increased communication overhead in route recovery. Therefore, both traffic and segment status must be considered. This project presents real-time intersection-based segment aware routing (RTISAR), an intersection-based segment aware algorithm for geographic routing in VANETs.
This routing algorithm provides an optimal route for forwarding the data packets toward their destination by considering the traffic segment status when choosing the next intersection. RTISAR presents a new formula for assessing segment status based on connectivity, density, load segment, and cumulative distance toward the destination. As a result, this mechanism minimizes the communication overhead generated during the segment status computation process. The evaluation results provided evidence that RTISAR outperforms in terms of packet delivery ratio, packet delivery delay, and communication overhead.
Keywords: Communication Overhead, VANETS, Segment Aware.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
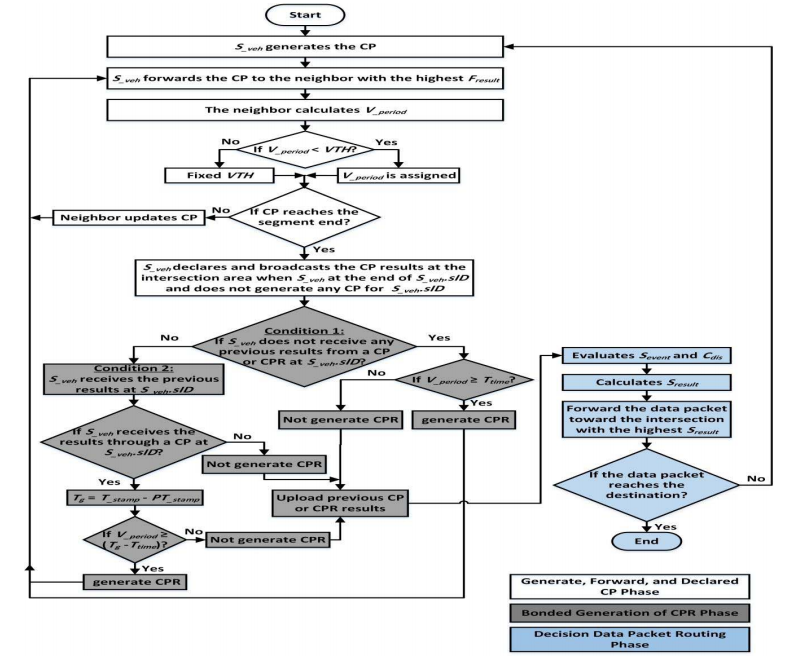
Block Diagram
Specifications
HARDWARE SPECIFICATIONS:
System: Pentium IV 2.4 GHz.
Hard Disk: 40 GB.
Floppy Drive: 1.44 Mb.
Monitor: 15 VGA Colour.
Mouse : Logitech.
Ram: 512 Mb.
SOFTWARE SPECIFICATIONS:
Operating system: Windows XP/7/LINUX.
Implementation: NS2
NS2 Version: NS2.2.34
Front End: OTCL (Object Oriented Tool Command Language)
Tool: Fedora (To simulate in Linux OS)
Learning Outcomes
- What is Tomcat server and how they can work?
- What is Communication Overhead?
- What is VANETS?
- What is segment Aware?
- What type of technology versions is used?
- Data Parsing Front-End to Back-End.
- Need of Eclipse-IDE to develop a web application.
- Working Procedure.
- Testing Techniques.
- Error Correction mechanisms.
- How to run and deploy the applications?
- Introduction to basic technologies used for.
- How project works?
- Input and Output modules.
- How to test the project based on user inputs and observe the output?
- Practical exposure to software tools and solution providing for real time problems working with team/ individual work on Creative ideas.
- Learn about types of algorithms and how to use?
- Project Development Skills:
- Problem analyzing skills.
- Problem solving skills.
- Creativity and imaginary skills.
- Programming skills.
- Deployment.
- Testing skills.
- Debugging skills.
- Project presentation skills.
- Thesis writing skills.



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.
