Probabilistic Terrain Mapping for Mobile Robots with Uncertain Localization
Abstract
Mobile robots build on accurate, real-time mappingwith onboard range sensors to achieve autonomous navigation over rough terrain. Existing approaches often rely on absolute localization based on tracking of external geometric or visual features. To circumvent the reliability-issues of these approaches, we propose a novel terrain mapping method which bases on proprioceptive localization from kinematic and inertial measurementsonly. The proposed method incorporates the drift and uncertainties of the state estimation and a noise model of the distance sensor. Unmanned ground vehicles (UGVs) require knowledgeof the surrounding to safely and efficiently navigate through an environment. In rough terrain, an accurate terrainmodel is essential for a robot to plan a motion over and around obstacles
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
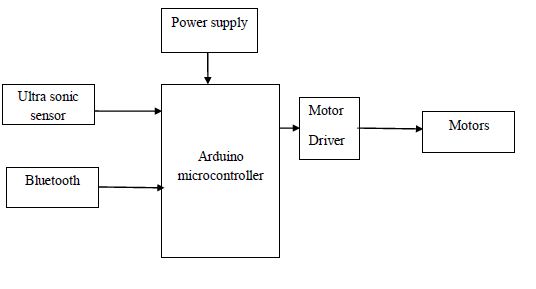
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.