Obstacle Avoidance Robotic Vehicle
Abstract
This paper is designed to build a line follower and obstacle avoidance bot using IR sensor and . The IR sensor is meant to trace a particular line and are meant to detect obstacles which it encounters. ROBOT has sufficient intelligence to cover the maximum area of space provided. It will move in a particular direction specified by the user and avoids the obstacle which is coming in its path. Autonomous Intelligent Robots are robots that can perform desired tasks in unstructured environments without continuous human guidance. The path can be visible like a black line on the white surface (or vice-verse).
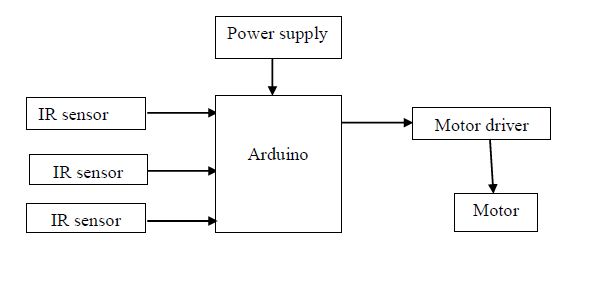
AVOIDANCE Concept of working of line follower and obstacle avoidance is related to light. We use here the behavior of light at black and white surface. When light falls on a white surface it is almost full reflected and in case of black surface light is completely absorbed. We have used IR transmitter and IR receivers also called as Photo diodes. They are used for sending and receiving light. IR transmits infrared lights. When infrared rays falls on white surface, it’s reflected back and catches by photodiodes which generates some voltage changes. When IR light falls on a black surface, light is absorb by the black surface and no rays are reflected back, thus photo diode does not receive any light or rays. controlling whole process of line following an obstacle avoidance. Arduino reads every pin from each component and acts accordingly. Driver section: Driver section consists of Motor driver and motors. Motor driver is used for driving motors because Arduino does not supply enough voltage and current to motor. Arduino sends commands to this motor driver and then it drives motors in any direction as we want. Working of line follower and obstacle avoidance robot is very interesting. Then Arduino drives the motor according to sensors' output.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.