Modeling Human-Likeness in Approaching Motions of Dual-Arm Autonomous Robots
Also Available Domains Raspberry pi|Android
Abstract
This project addresses the problem of obtaining human-like motions with an anthropomorphic dual-arm torso assembled on a mobile platform. The focus is set on the coordinated movements of the robotic arms and the robot base while approaching a table to subsequently perform a bimanual manipulation task. For this, human movements are captured and mapped to the robot in order to compute the human dual-arm synergies. Since the demonstrated synergies change depending on the robot position, a recursive Cartesian-space discretization is presented based on these differences. Thereby, different movements of the arms are assigned to different regions. As an application example, a motion-planning algorithm exploiting this information is proposed and used. This versatility is augmented when two robotic arms are mounted on the mobile platform In general, dual-arm robotic systems are used to perform coordinated manipulation tasks including regrouping, either arriving to a closed kinematic chain, or cooperating with open chain coordinated movements. Even though dual-arm robot manipulation has been widely investigated
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
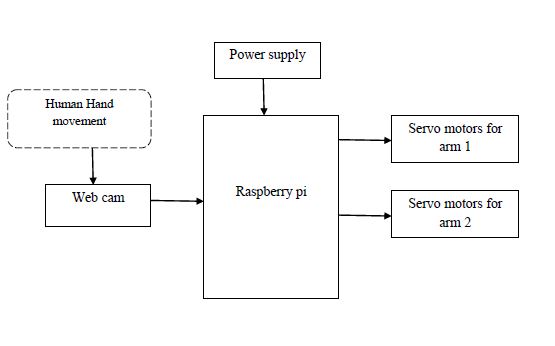
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.