IR Based Obstacle Detection Project
Abstract
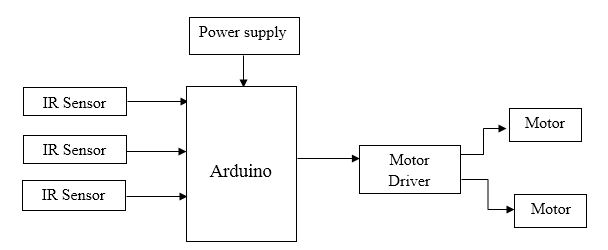
Obstacle Detection Robot is an intelligent device which can automatically sense the obstacle in front of it and avoid them by turning itself in another direction. This design allows the robot to navigate in unknown environment by avoiding collisions, which is a primary requirement for any autonomous mobile robot. This project describes about an obstacle detecting robot which is controlled over IR Sensor. The robot is made using IR Sensor and it is controlled by Arduino microcontroller. IR sensors in the front portion of the robot which senses the obstacle and deviate its path to choose an obstacle free path. The data from the sensor is compared with Controller to decide the movement of the robot.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.