Improving Traffic Object Detection With vehicle Borne Fish eye Imaging
Objective
The primary objective is to develop and integrate two distortion-aware YOLO models, GeoFreq-YOLO and FishForge-YOLO, for accurate traffic object detection in fisheye images. Both models will be trained on the Fisheye8K dataset, with emphasis on improving precision and recall for objects near image boundaries where distortion is highest.The second objective is to build a lightweight web application using Flask, HTML, CSS, and JavaScript that provides user registration, login/logout, and a dashboard for accessing detection services. The system will include an image detection module where users can upload fisheye images, choose either GeoFreq-YOLO or FishForge-YOLO, and receive annotated outputs with bounding boxes and class labels. A live detection module will also support real-time camera input with continuous object detection. All user sessions and detection results will be stored in an SQLite database. The application will additionally provide a side-by-side comparison of both models on the same input, while remaining lightweight, self-contained, and easy to run using only Python and a web browser.
Abstract
Fisheye cameras mounted on vehicles capture a wide field of view, but their strong barrel distortion severely degrades the accuracy of standard object detectors. This project presents a web‑based system that integrates two detection algorithms designed specifically for fisheye imagery: GeoFreq‑YOLO and FishForge‑YOLO. GeoFreq‑YOLO incorporates geometric frequency features that model the radial distortion pattern, while FishForge‑YOLO employs distortion‑aware convolution layers to recover reliable features near image boundaries. Both models are trained and evaluated on the Fisheye8K dataset, which contains 8,000 annotated traffic scenes. A lightweight Flask application with an SQLite database provides user authentication, an image upload detection module, and a live camera‑feed detection interface. The browser‑based front‑end allows users to select the model, view bounding‑box results, and compare performance without installing specialised software. The system achieves notable improvement in detecting small and heavily warped objects compared to unmodified detectors. The modular architecture separates detection logic from the web service, making it easy to extend or retrain the models. This work demonstrates that distortion‑aware YOLO variants, coupled with a simple web platform, can make fisheye‑based traffic monitoring more accessible and effective.
Keywords: fisheye object detection, YOLO, geometric frequency, convolutional neural network, traffic monitoring, distortion correction, vehicle‑borne camera, Flask web application, SQLite, Fisheye8K datasets.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
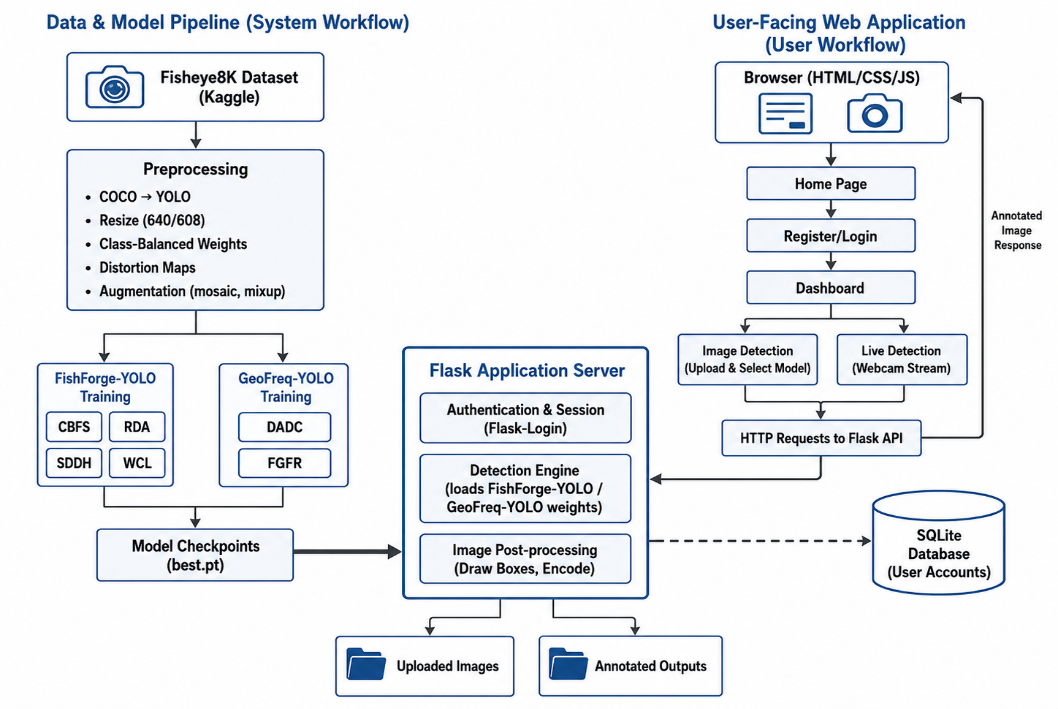
Block Diagram
Specifications
5.2 HARDWARE REQUIREMENTS
Processor - I3/Intel Processor
Hard Disk - 160GB
Key Board - Standard Windows Keyboard
Mouse - Two or Three Button Mouse
Monitor - SVGA
RAM - 8GB
5.3 SOFTWARE REQUIREMENTS:
Operating System : Windows 7/8/10
Server side Script : HTML, CSS
Programming Language : Python
Libraries : Flask, Os, pandasUltralytics, Numpy
IDE/Workbench : VsCode
Technology : Python 3.8+
Database : sqllite



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.