Implementation of a Wireless Human Hand Gesture Controlled Robotic Arm
Objective
The project enabling intuitive control of robotic arms through hand gestures, leveraging wireless technology for seamless interaction in diverse applications, from manufacturing to healthcare.
Abstract
The primary objective of this project is to develop a wireless human hand gesture-controlled robotic arm utilizing flex sensors. By embedding flex sensors in a glove worn by the user, the system detects and translates finger movements into corresponding actions performed by the robotic arm. This technology allows for intuitive and control of the robotic arm, offering potential applications in prosthetics, industrial automation, and other fields requiring accurate manipulation. The wireless communication between the glove and the robotic arm ensures flexibility and ease of use, making this system an effective solution for enhancing human-robot interaction and expanding the capabilities of robotic applications.
Keywords: Flex Sensor, robotic arm.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
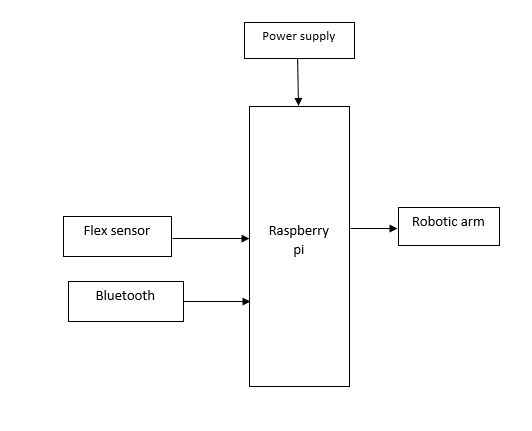
Specifications
Hardware Requirements:
- Raspberry pi
- Flex sensor
- Robotic arm
- Bluetooth
- Power Supply
Software Requirements:
- Raspbian os
- Python
Learning Outcomes
- Raspberry pi diagram and architecture
- How to install rasbian os IDE software
- Setting up and installation procedure for Raspberry pi
- Introduction to Raspberry pi IDE
- Basic coding in Raspberry pi IDE
- Working of flex sensor
- Working of power supply
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills



Related Projects
 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.