Hand Motion Controlled Robotic Vehicle
Abstract
As we continue to automate the world to make our lives easier, the fundamental nature of work is changing. Manpower required in factories have reduced significantly because most of the work is now being done by machines. In simple words human arms are being replaced by robotic arms. Consequently robotic arm takes on the burden of manual, repetitive tasks, freeing people to achieve their potential. Also these automated arms produce better results, reduces injury and drives industry further. Most importantly using them has also helped in making processes more efficient and less noisy. Availability of robotic arms for monotonous and dangerous tasks has reserved human hands for critical and safer work, resulting in elevation of their value. This article aims to provide you with working of it, parts comprising it, its applications and projects related to this incredible technology.
This paper discusses the design and fabrication of a pick and place robotic arm. The robotic arm is intended for educational purposes. In this project we are designing the robotic arm for improved accuracy by using dc motors to power the joints in the robotic arm. We are designing the robotic arm using keiluvision software. In this project we are going to fabricate robotic arm which performs the pick and place operation. The project covers the procedure for selection of the motors used to power each joint of the arm in details. We are selecting Aluminum to fabricate the components of the robotic arm. The torque exerting at each of the joints is going to calculate in this project and a dc motor with the required torque rating is being selected for each joint. Selecting a suitable dc motor controller and control software for the Robotic arm is developing using C programming language.
Keyword: Safety, Pick and Place, Arduino uno, 8051.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
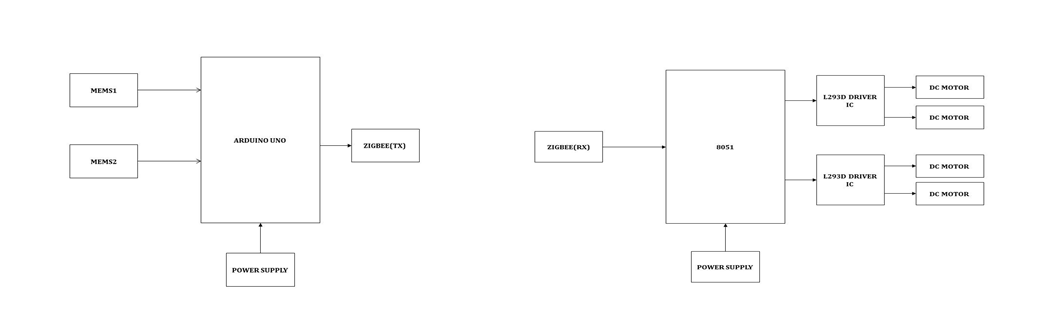
Specifications
Hardware Requirements:
- Power supply
- Arduino UNO
- 8051 Microcontroller
- Transformer
- MEMS sensors-2
- Zigbee pair module
- L293D Motor driver-2
- DC motors-4
Software Requirements:
- Arduino IDE
- Embedded C
- Keil U vision
- Willar programmer
Learning Outcomes
- Arduino UNO Pin diagram and Architecture
- How to install arduino IDE software
- Setting up and installation procedures for Arduino UNO
- Introduction to Arduino IDE
- Commands in Arduino
- Basic coding in arduino
- 8051 Pin diagram and Architecture
- How to install Keil software
- Setting up and installation procedures for Keil
- Introduction to Keil IDE
- Commands in 8051
- Basic coding in 8051
- Introduction to serial communication
- How to interface the zigbee module with 8051 and arduino uno?
- About Project Development Life Cycle:
- Planning and Requirement Gathering ( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools
- Solution providing for real time problems
- Working with team/ individual
- Work on creative ideas
- Project development Skills:
- Problem analyzing skill
- Problem solving skill
- Creative and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.