Eye Movement-Based Robot Control System Using Raspberry Pi and USB Camera
Objective
The objective of this project is to develop a hands-free robot control system that uses real-time eye movements, captured by a USB camera and processed by a Raspberry Pi, to direct the robot's movements based on user gaze.
Abstract
This
project presents a novel method for controlling a robot using real-time eye
movements captured by a USB web camera connected to a Raspberry Pi. The system
interprets specific eye movements to dictate the direction of movement for a
robot platform equipped with DC motors: looking up moves the robot forward,
looking down moves it backward, looking right moves it right, looking left
moves it left, and when the eyes are centered, the robot stops. The USB camera
continuously captures video of the user’s eyes, which is processed on the
Raspberry Pi using image processing algorithms to detect and analyze eye
positions within the frames. Commands corresponding to the detected eye
movements are then sent to the robot platform’s DC motors via the Raspberry
Pi’s GPIO pins, ensuring responsive and accurate movement based on the user’s
eye gestures. This innovative system combines computer vision techniques for
eye tracking with robotics, offering a hands-free and intuitive method for
controlling robots, with potential applications in assistive robotics,
human-machine interaction research, and accessible interfaces for users with
mobility challenges.
Keywords: robot control, eye movement, USB web camera, Raspberry Pi, computer vision, DC motors, real-time processing, robotics platform, assistive robotics, human-machine interaction
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
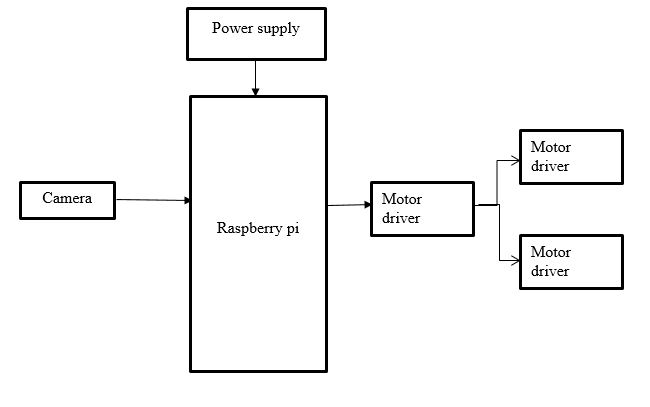
Block Diagram
Specifications
Hardware components:
- Raspberry pi
- Camera
- Motor driver
- Dc motor
- Power supply
Software components:
- Python idle
- Raspbian OS
Learning Outcomes
- raspberry pi pin diagram and architecture
- How to install python IDE software
- Setting up and installation procedure for python
- Introduction to python IDE
- Basic coding in python IDE
- Working of power supply
- Working of Dc motor
- Working of camera
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.