Enhancing Accuracy in Detecting Vehicles Using Sift Over SVM, CNN, Yolo, SSD
Objective
The main objective of this project to augment the accuracy and detecting the vehicles using scalar invariant feature transform (SIFT) in SVM, CNN, YOLO, SSD for image dataset.
Abstract
Keywords - SVM classifier, CNN, YOLO, SSD, Scalar Invariant Feature Transform (SIFT), Traffic Data Images, Vehicles.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
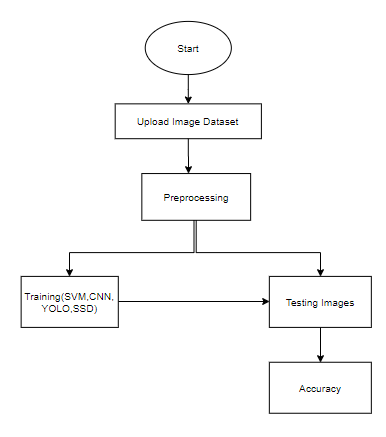
Block Diagram
Specifications
H/W Specifications:
- Processor : I5/Intel Processor
- RAM : 8GB (min)
- Hard Disk : 128 GB
S/W Specifications:
- Operating System : Windows 10
- Server-side Script : Python 3.6
- IDE : Jupyter notebook
- Libraries Used : Numpy, IO, OS, Keras, pandas, tensorflow, OpenCV
Learning Outcomes
- Practical exposure to
- Hardware and software tools
- Solution providing for real time problems
- Working with team/individual
- Work on creative ideas
- Testing techniques
- Error correction mechanisms
- What type of technology versions is used?
- Working of Tensor Flow
- Implementation of Deep Learning techniques
- Working of CNN algorithm
- Working of Transfer Learning methods
- Building of model creations
- Scope of project
- Applications of the project
- About Python language
- About Deep Learning Frameworks
- Use of Data Science



Related Projects
 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.