Electromagnetic torque based MRAS speed estimator for sensorless SMPMSM drive
Objective
The main objective of this project is to improve performance of surface mount sensor less permanent magnet synchronous motor (SMPMSM) drive at standstill and low-speed regions.
Abstract
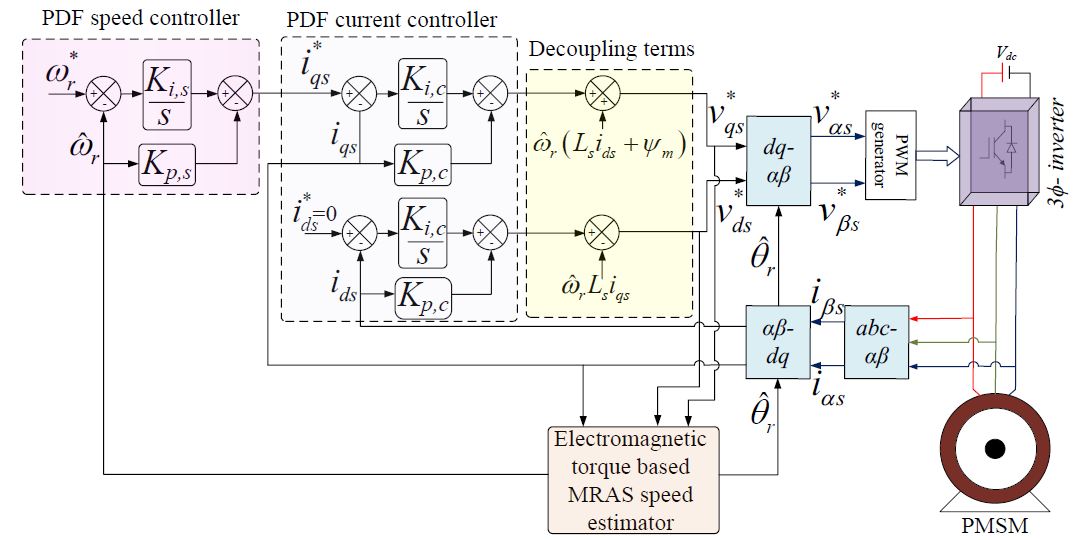
In this project, simple and robust electromagnetic torque based MRAS speed estimator with cascaded Pseudo Derivative Feedback (PDF) controller is proposed for sensor-less SMPMSM drive to improve its performance at standstill and low speed regions.
The proposed estimator is formed using instantaneous and estimated electromagnetic torque. Using small signal modelling, the stability and sensitivity analysis are performed. Results show that, the estimator is stable over a wide speed region (including low speed regions) and exhibits robustness against uncertainties in machine parameters. The feasibility of the proposed control scheme has been verified by simulation in MATLAB/SIMULINK.
Keywords: Surface Mount Permanent Magnet Synchronous Motor (SMPMSM), Model Reference Adaptive System (MRAS), Field Oriented Control (FOC).
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Software Configuration:
Operating System : Windows 7/8/10
Application Software : Matlab/Simulink
Hardware Configuration:
RAM : 8 GB / 4 GB (Min)
Processor : I3 / I5(Mostly prefer)
Learning Outcomes
- Introduction to Matlab/Simulink
- What is EISPACK & LINPACK
- How to start with MATLAB
- About Matlab language
- About tools & libraries
- Application of Matlab/Simulink
- About Matlab desktop
- Features of Matlab/Simulink
- Basics on Matlab/Simulink
- Introduction to motors.
- Study of Surface Mount permanent synchronous motor.
- Design
of Surface Mount permanent synchronous motor.
- Design
of voltage source converter.
- Introduction
to electrical drives.
- Analysis
of power converters.
- Introduction
to controllers.
- We
can learn about synchronous reference frame theory.
- We
can learn about Clark’s transformation.
- Design
of pi controller.
- Introduction
to the types of filters.
- Introduction
to closed loop, open loop control methods.
- Study
of PWM techniques.
- Design
of PDF current controller.
- Different
rotor position estimation techniques.
- Design
of PDF speed controller.
- Design
of Electromagnetic torque based MRAS speed estimator.
- Introduction
sensors.
- Project
Development Skills:
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.