Design of Rescue Robot and Pipeline Inspection Using Zigbee
Objective
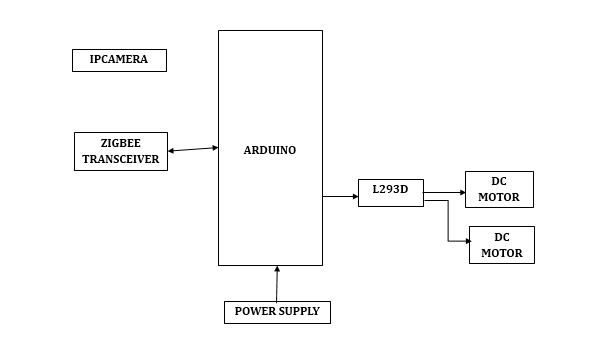
The main objective of this project is to develop rescue robot for the child who fell in borehole. An IP camera is used to get audio and video on to PC through Zigbee transceivers and Robot can be controlled through commands given from PC
Abstract
Now a days child often fall down in the borehole which is left uncovered and get trapped. It is very difficult and also risky to rescue the trapped children. A small delay in the rescue can cost the child his or her life. The objective of the project is to construct and design a bore well rescue robot (i:e to rescue a trapped baby from bore well). This project is a human controlled robot that gives an insight view of rescuing the baby safely and steps taken to achieve this.
The advent of new high-speed technology and the growing computer capacity provided realistic opportunity for new robot controls and realization of new methods of control theory. Robotics is one field within artificial intelligence. It involves mechanical, usually computer-controlled, devices to perform tasks that require extreme precision or tedious or hazardous work by people
Keywords: L293D H- bridge motors, Motor control, Robot, Robot arm, Wireless camera, Zigbee
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware Requirements:
- Zigbee Pair
- Relay
- L293D motor driver
- DC Motors
- Battery
Software Requirements:
- Arduino IDE
- Embedded C
- Fritzing
- Bluetooth mobile application
Learning Outcomes
Setting up and installation procedure for arduino IDE
Basics of Embedded C
Interface of L293D with Arduino
Interface Bluetooth with Arduino
Interface DC Motor with Arduino
About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.