Design of a Raspberry Pi 4B-Based Guide Robot with YOLO-v10 Integration
Objective
The objective of this project is to design an intelligent guide robot using Raspberry Pi 4B and YOLO-v10 that assists visually impaired individuals in safe navigation by detecting obstacles, providing real-time voice-guided directions, and enabling remote monitoring for enhanced safety and independence
Abstract
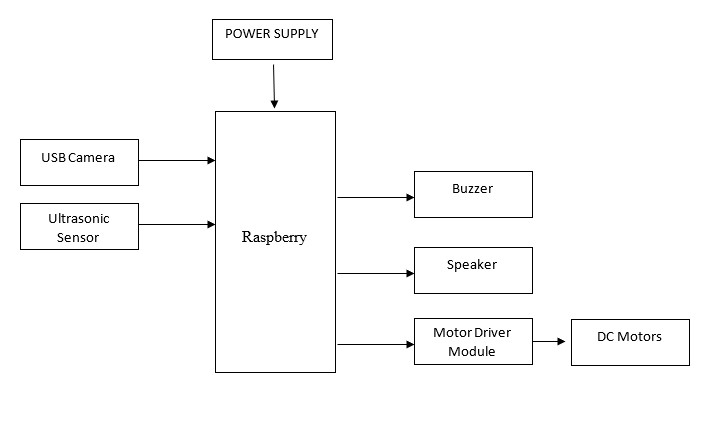
The Design of a Raspberry Pi 4B-Based Guide Robot with YOLO-v10 Integration is an intelligent robotic system developed to assist users through autonomous navigation and real-time object detection. The system utilizes Raspberry Pi 4B as the main controller and a USB camera for capturing live video streams. YOLO-v10 is employed for real-time object detection and recognition, enabling the robot to identify obstacles, people, and important objects in its surroundings. An ultrasonic sensor continuously measures the distance between the robot and nearby obstacles to support safe navigation. Two DC motors, controlled through a motor driver, provide movement to the robot chassis, while dummy shafts ensure stability. A buzzer and speaker are incorporated to generate warning alerts and voice guidance messages based on detected objects and navigation conditions. Python is used for YOLO-v10 model training, object detection, navigation control, and alert generation. The proposed system provides an intelligent, efficient, and user-friendly robotic guidance solution for indoor and outdoor environments.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware components:
- Raspberry Pi 4B
- USB Camera
- Ultrasonic Sensor
- DC Motors (2)
- Motor Driver Module
- Robot Chassis
- Dummy Shafts (2)
- Wheels
- Speaker
- Buzzer
- Power Supply
- 12V Adapter
- Connectors – 30
Software components:
- Raspbian OS
- Python
Learning Outcomes
- Understand Raspberry Pi architecture and GPIO configuration
- Learn how to install and configure Raspbian OS and required Python libraries
- Interface analog sensors with Raspberry Pi using MCP3008 ADC
- Implement image classification using Artificial Neural Networks
- Develop real-time skin analysis using USB camera input
- Build automated health screening systems with display and alert features
- Integrate temperature and heartbeat monitoring in diagnostic systems
- Analyze and interpret classification output for healthcare applications
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills:
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills



Related Projects
 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.