Design and Implementation of a Line Following Robot Using Raspberry Pi, USB Camera, and Python Programming
Objective
The objective of this project is to design and implement a line-following robot that autonomously navigates a predetermined path using a Raspberry Pi, USB camera, and Python with OpenCV for real-time image processing. The system aims to accurately detect and follow a black line, ensuring precise and continuous movement along the designated route.
Abstract
This project presents the design and implementation of a line-following robot using a Raspberry Pi, a camera, and OpenCV with Python. The primary objective is to develop a system where the robot autonomously navigates along a predetermined path marked by a black line. The camera, mounted on the robot, continuously captures the environment in front of the robot. By leveraging the image processing capabilities of OpenCV, the system analyzes the captured frames to detect the presence of the black line.The algorithm processes the images to identify the position and orientation of the line relative to the robot. If the black line is detected, the robot's control system commands the motors to move the robot forward, ensuring it stays on track. Conversely, if the black line is not detected, the robot halts its movement to prevent deviation from the path.
This project demonstrates the integration of computer vision with robotics, showcasing a practical application of image processing for autonomous navigation. The proposed system offers a foundation for further advancements in autonomous vehicles and intelligent robotic systems, potentially benefiting various industries, including manufacturing, logistics, and transportation.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
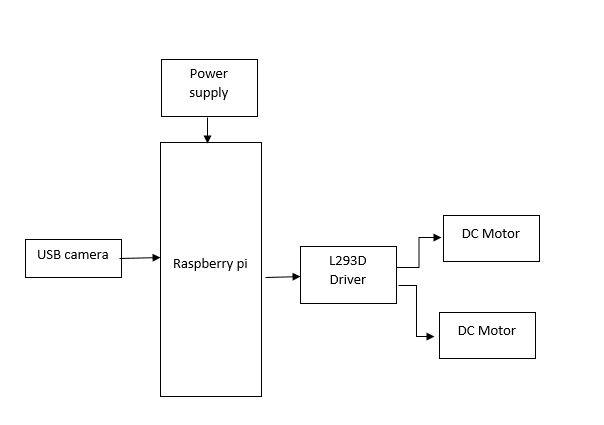
Specifications
Hardware Requirements
- Power Supply
- USB Camera
- L293D Driver
- DC Motor
- Power Supply
Software Requirements
- Raspbian OS
- Python
Learning Outcomes
- Raspberry pi diagram and architecture
- How to install rasbian os IDE software
- Setting up and installation procedure for Raspberry pi
- Introduction to Raspberry pi IDE
- Basic coding in Raspberry pi IDE
- Working of flex sensor
- Working of power supply
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.