Design and Implementation of a Disinfecting Mobile Robot Based on a Raspberry Pi
Objective
This project develops a Raspberry Pi-powered disinfecting mobile robot that uses sensors and automated spraying to enhance sanitation and reduce pathogen spread.
Abstract
This paper presents the design and implementation of a disinfecting mobile robot based on a Raspberry Pi platform. The robot is designed to autonomously clean and disinfect spaces using a combination of motors, sensors, and relays. The system integrates a Bluetooth module for wireless communication, allowing the user to send commands to control the robot's movements and operation. The robot is driven by two DC motors connected to a motor driver, enabling it to move forward and reverse. Three relays are incorporated for controlling different functions: the first relay manages the water pump to deliver disinfectant, which can be turned on or off via Bluetooth commands; the second relay controls the CPU fan to maintain optimal temperature; and the third relay activates cleaning when the robot detects wet conditions. The entire system is powered by a stable power supply, ensuring reliable performance. This mobile disinfecting robot leverages Raspberry Pi's flexibility to perform various functions, contributing to efficient sanitation in various environments.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
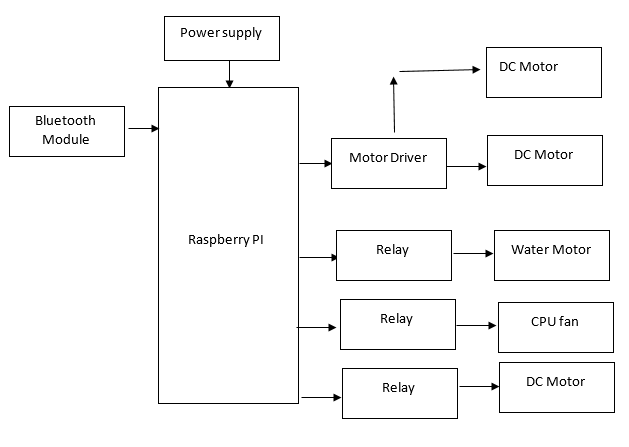
Specifications
- Raspberry Pi
- Bluetooth Module
- Relay Module-3
- DC Motor-3
- Motor Driver (L298N or similar)
- Water Pump
- CPU Fan
- Power Supply
Learning Outcomes
- - Understanding the Design and Architecture of a Mobile Robot
- - Raspberry Pi Integration with Motor Driver and DC Motors
- - Bluetooth Communication with Raspberry Pi
- - Basic coding with Raspberry Pi
- - Water Pump Integration for Disinfection
- - Mobile Robot Navigation
- - Temperature Regulation for Raspberry Pi
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.