Classify Object Behaviour to Enhance the Safety of Autonomous Vehicles
Objective
To develop a MATLAB-based simulation replicating autonomous vehicle behaviour for real-time decision-making, including pedestrian detection, traffic signals, lane changes, and obstacle avoidance in urban environments.
Abstract
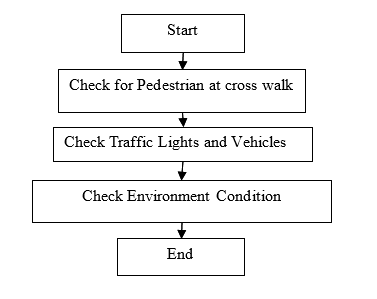
This paper presents a MATLAB-based simulation model for autonomous vehicle behavior in dynamic urban environments, emphasizing real-time decision-making and environmental awareness. The core objective of the simulation is to replicate intelligent vehicle responses to various real-world scenarios including pedestrian interaction, traffic signals, inter-vehicle navigation, and environmental challenges like fog. The vehicle is programmed to estimate the speed of a crossing pedestrian and respond appropriately to ensure safety by stopping when necessary. It adheres to traffic signal rules by halting at red lights and resuming motion upon green. In-lane obstacle detection is continuously performed to monitor the presence of slower vehicles. When an obstacle is detected in the current lane, the simulation evaluates the adjacent lane for safety. If the adjacent lane is clear, the vehicle initiates a lane change with a visual turn signal. In cases where the adjacent lane is also obstructed, the vehicle slows down and, after a delay, honks to alert nearby drivers. The simulation also integrates a fog effect to test reduced visibility scenarios, under which the vehicle automatically adjusts its speed. Position, lane, and velocity updates are computed in real time based on sensory inputs and environmental feedback. A graphical interface displays the animated road, dynamic lane lines, traffic lights, other vehicles, pedestrians, and the vehicle’s maneuvers, allowing users to visualize the full autonomous driving scenario. This model provides a foundational platform for testing and developing more advanced algorithms in autonomous driving and environment-based decision systems.
Index Terms— Autonomous vehicle, MATLAB simulation, pedestrian detection, traffic signal recognition, lane change, obstacle avoidance, fog simulation, real-time decision-making, vehicle speed control, intelligent transportation systems.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Software: Matlab 2020a or above
Hardware:
Operating Systems:
- Windows 10
- Windows 7 Service Pack 1
- Windows Server 2019
- Windows Server 2016
Processors:
Minimum: Any Intel or AMD x86-64 processor
Recommended: Any Intel or AMD x86-64 processor with four logical cores and AVX2 instruction set support
Disk:
Minimum: 2.9 GB of HDD space for MATLAB only, 5-8 GB for a typical installation
Recommended: An SSD is recommended A full installation of all MathWorks products may take up to 29 GB of disk space
RAM:
Minimum: 4 GB
Recommended: 8 GB
Learning Outcomes
· Introduction to Matlab
· What is EISPACK & LINPACK
· How to start with MATLAB
· About Matlab language
· Matlab coding skills
· About tools & libraries
· Application Program Interface in Matlab
· About Matlab desktop
· How to use Matlab editor to create M-Files
· Features of Matlab
· Basics on Matlab
· What is an Image/pixel?
· About image formats
· Introduction to Image Processing
· How digital image is formed
· Importing the image via image acquisition tools
· Analyzing and manipulation of image.
· Phases of image processing:
o Acquisition
o Image enhancement
o Image restoration
o Color image processing
o Image compression
o Morphological processing
o Segmentation etc.,
· How to extend our work to another real time applications
· Project development Skills
o Problem analyzing skills
o Problem solving skills
o Creativity and imaginary skills
o Programming skills
o Deployment
o Testing skills
o Debugging skills
o Project presentation skills
o Thesis writing skills
Demo Video

Request for Video
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.