CAN : Protocol-Based Embedded System to Avoid Rear-End Collision of Vehicles
Also Available Domains Arduino
Objective
The main theme of this project is to avoid the rear end crashing of any two vehicles, if anything that is to happen like that it will warn the driver along with a message.
Abstract
Driver and passenger safety is one of the prime concerns in modern day vehicle. Alarming statistics of accidents and increased number of vehicles on road demands for an intelligent safety mechanism that helps the driver in handling immediate precarious situations like sudden probability of a rear- end collision. CAN transport (Controller Area Network) which is broadly utilized as a part of various fields of industry and specific in the auto business, which permit the investigation of information going through the transport and era of messages.
A dynamic shrewd demonstrative framework on the system that cautions and helps the driver in effective driving and the technical expert with finding among other accessible information is the need of great importance. The work proposes arduino based execution to caution around a crash and overcome it. The controller is employed with a built-in CAN protocol which plays the major role in communicating with all the devices and sensors. Ultrasonic sensor acts as an obstacle detector for front-end of the vehicle. Motor driver acts as an interface between controller and the motor it will represent vehicle. MEMS sensor is used to detect the accident whenever accident is occurred it will send location of the vehicle to the corresponding stack holders.
Keywords: CAN Protocol, MCP2510, Arduino uno.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
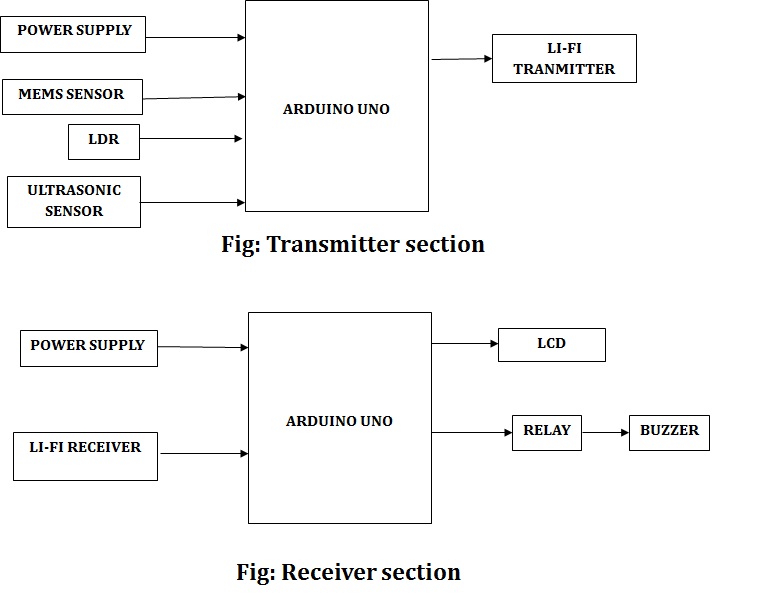
Specifications
Hardware Requirements:
- Arduino uno
- Ultrasonic sensor
- Temperature sensor
- MEMS sensor
- 16x2 LCD
- GPS Module
- GSM Module
- L293D Motor driver
- DC Motor
- Relay
- Buzzer
- Power supply
- Mcp2510
- Transformer
Software Requirements:
- Arduino ide
- Embedded C
- Fritzing
Learning Outcomes
- Arduino Pin diagram and Architecture
- Installation of arduino ide
- Basic coding in Embedded C
- Working of ultrasonic sensor
- How to interface ultrasonic sensor with arduino uno?
- Working of MEMS sensor
- How to interface MEMS sensor with arduino uno?
- Working of temperature sensor
- How to interface temperature with arduino uno?
- Introduction to serial communication
- Working of MCP2510
- How to interface MCP2510 with arduino uno?
- Working of GSM Module
- Working of GPS module
- How to interface GSM and GPS module with arduino uno?
- Working of 16x2 LCD
- How to interface LCD with arduino uno?
- Working of relay and buzzer
- How to interface relay with arduino?
- How to interface buzzer with arduino?
- Working of L293D Motor driver
- How to interface L293D Motor driver and dc motor with arduino uno?
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



Related Projects
 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.