Autonomous vehicle avoidance system using LIDAR
Also Available Domains Arduino|Raspberry pi
Objective
The main objective of the project is to implement autonomous vehicle system which gives a solid solution to many problems in an efficient manner, which uses a Raspberry Pi and a LIDAR module for indoor navigation
Abstract
Autonomous miniature vehicles are widely used to test many types of algorithms and simulate the driving behavior as in the real world. In the last decade, several approaches have been proposed for obstacle avoidance in self-driving vehicles. In this project, we present our autonomous vehicle implementation which gives a solid solution to this problem in an efficient manner, using a Raspberry Pi and a LIDAR module for navigation.
Our vehicle is capable of navigating in an unknown environment while avoiding obstacles. Unlike other implementations, our vehicle doesn’t use Computer Vision (CV) techniques for obstacle detection but only a single LIDAR sensor and thus can safely navigate in low luminosity environments. When obstacle is found in its path, automatic turning the vehicle into other direction is done.
Keywords: RPLIDAR A2, raspberry pi, motor.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
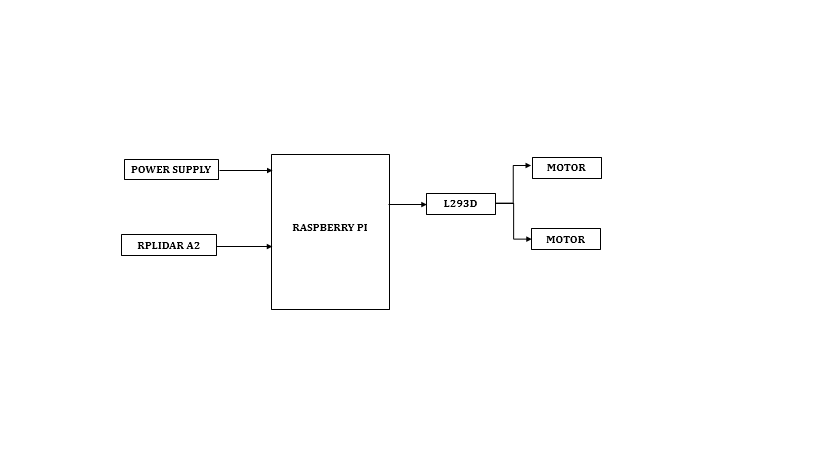
Block Diagram
Specifications
Hardware Requirements:
- Raspberry Pi
- Micro SD card
- RPLIDAR A2
- L293D Motor driver
- DC Motors
Software Requirements:
- NOOBS OS
- VNC Viewer
- Python3 IDE
- Fritzing
Learning Outcomes
- Raspberry Pi pin diagram and its architecture
- What is RPLIDAR A2
- Working of RPLIDAR A2
- Working of L293D motor driver
- How to interface RPLIDAR A2 with Raspberry Pi?
- How to interface the L293D Motor driver and dc motor with Raspberry Pi?
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.