Automated Oil Spill Detection and Segmentation in Marine Ecosystems Using Drone-Captured Images and Attention-Enhanced Convolutional Architectures
Objective
The primary objective of this project is to develop and evaluate novel deep learning architectures for automatic oil spill segmentation from drone?captured RGB imagery. The system aims to classify each pixel into three classes: Oil, Water, and Other (ships, sky, quays). Specific goals include: (1) addressing challenges such as ambiguous oil?water boundaries, irregular slick shapes, domain shift between port and open?sea datasets, and severe class imbalance; (2) designing lightweight yet robust models (HFC?Net and SSM?FusionNet) that integrate feature calibration, contour supervision, and spatial?spectral fusion.
Abstract
Marine
oil spills pose significant threats to aquatic ecosystems, affecting
biodiversity, water quality, and coastal resources. Accurate and timely
detection of oil spills is essential for environmental monitoring and
mitigation efforts. This project presents an automated framework for oil spill
detection and segmentation using drone-captured images, leveraging
attention-enhanced convolutional architectures. The proposed system integrates
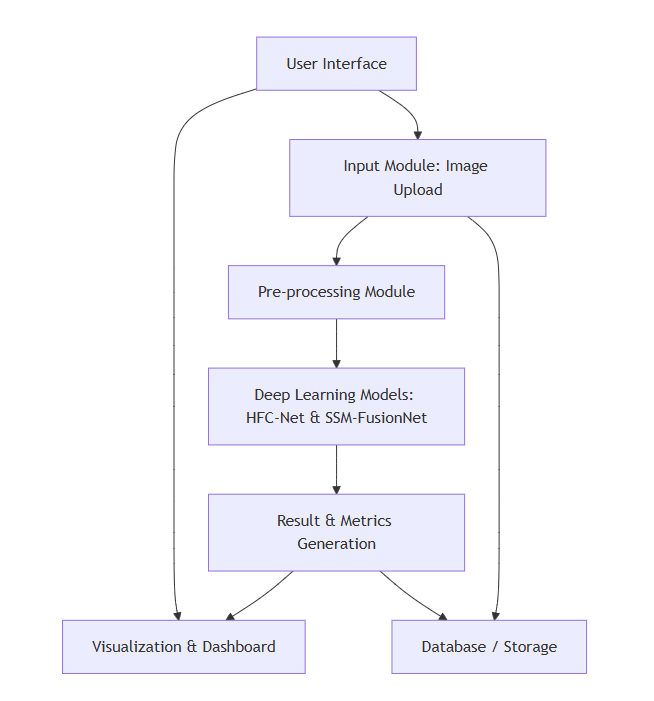
two deep learning models, HFC‑Net and SSM‑FusionNet, to address common
challenges in oil spill segmentation, such as ambiguous boundaries, irregular
shapes, appearance variability, domain shifts, and class imbalance. HFC‑Net
employs hierarchical feature calibration with contour-based supervision and
dynamic feature aggregation to precisely identify oil-water boundaries. SSM‑FusionNet
combines spectral and spatial feature fusion with adaptive gating mechanisms to
capture thin sheets and emulsion patterns under varying environmental
conditions. Both models are trained and evaluated on datasets from Zenodo and
LADOS, ensuring robustness across different marine scenarios. The system is
deployed using a Flask-based web interface, allowing users to register, log in, visualize model performance, and perform oil spill predictions. Experimental
results demonstrate that the proposed models achieve high segmentation accuracy
and improved mean Intersection over Union (mIoU), outperforming standard
convolutional architectures while maintaining efficient computational
requirements. The framework offers an effective solution for environmental
agencies and marine monitoring authorities to identify oil spill extents
accurately and promptly.
Keywords: Oil Spill, Segmentation, Drone Imagery, Deep Learning, HFC‑Net, SSM‑FusionNet, Attention Mechanism, Convolutional Neural Networks, Environmental Monitoring, Flask.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
4.3 Hardware Requirements
Processor - I3/Intel Processor
Hard Disk - 160GB
Key Board - Standard Windows Keyboard
Mouse - Two or Three Button Mouse
Monitor - SVGA
RAM - 8GB
4.4 Software Requirements
Operating System : Windows 7/8/10
Programming Language : Python
Libraries : Pandas, Numpy, scikit-learn.
IDE/Workbench : Visual Studio Code.
Framework : Flask




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.