A New ?-MRAS Method for Motor Speed Estimation
Objective
The main objective of the proposed system is to estimate the motor speed by utilizing the per-phase motor equivalent circuit.
Abstract
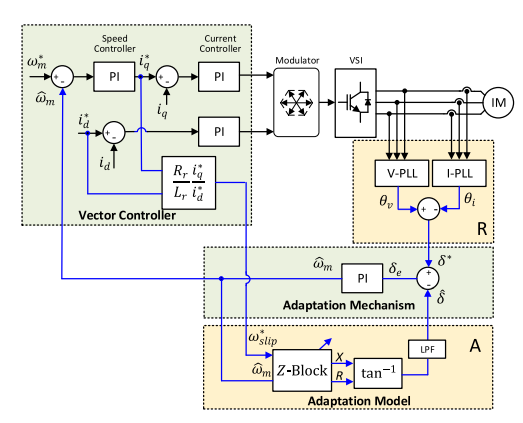
This paper introduces a new method to estimate the motor speed based on the Model Reference Adaptive System (MRAS) technique. The novelty of the proposed MRAS control structure relies on using the motor input impedance angle as a reference state variable to estimate the motor speed. In this context, the reference angle is obtained from measuring the angle between the motor terminal voltage and current vectors using a double-structure Phase Locked Loop (PLL). The tunable angle is instantaneously calculated using the per-phase motor equivalent circuit. Having the impedance angle as the only candidate for the proposed scheme inherently decouples the reference and the adaptive models. This decoupling resulted in obtaining a superior performance at low, high, and zero speeds. The simplicity of the reference and the adaptive schemes ease the analysis, design, and implementation. The introduced speed estimation concept is validated under different scenarios of operating conditions.
Index Terms—Model reference adaptive system (MRAS), motor input impedance angle, vector control, sensorless operation.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Software Configuration:
Operating System : Windows 7/8/10
Application Software : Matlab/Simulink
Hardware Configuration:
RAM : 8 GB
Processor : I3 / I5(Mostly prefer)
Learning Outcomes
- Introduction to Matlab/Simulink
- What is EISPACK & LINPACK
- How to start with MATLAB
- About Matlab language
- About tools & libraries
- Application of Matlab/Simulink
- About Matlab desktop
- Features of Matlab/Simulink
- Basics on Matlab/Simulink
- Introduction to controllers.
- Study of PWM techniques.
- Project Development Skills:
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills
Demo Video

Request for Video
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.