A Conveyor-belt Based Pick-and-sort Industrial Robotics Application
Abstract
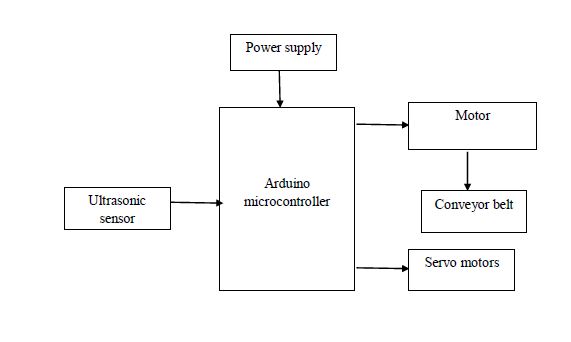
This paper describes an industrial robotics applicationfor picking up objects of different types from a moving conveyor belt and sorting the objects into bins. Object recognition required the highest processing times that were on par with the time required for the robot arm to execute its movement between four poses: pick approach, pick, pickretreat and place. Traditionally, an industrial part-handling robot is dedicated to a high-volume production process and uses a specialized end effector (gripper) to retrieve the same part repeatedly from a known position and orientation. This approach is ideal for large-scale manufacturing operations. Here we are designing a method for picking an object based on ultrasonic sensor on conveyor belt
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications




 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.