Trash Collector Robot
Objective
The main objective of this project is to design a robot which collects trash in different localities like industries, houses etc
Abstract
Today, world is facing major garbage crisis- the product of rapid economic growth, overcrowding, poor urban planning, corrosive corruption, and political dysfunction. This is mainly due to the rapid increase in population as well as physical resources. The present tried and tested strategies of trash collection have been proved ineffective. And the world nowadays is looking at smarter ways for overcoming the garbage assortment problem. This project presents the Garbage Collector robot for footpath using Arduino micro-controller.
The robot is built on a metallic base, which is powered by a battery of 12V. The robot is designed to collect Garbage from a footpath, public places (parks, schools, and colleges), mostly cemented paths and beach. The robot cannot be used on muddy surfaces. The robot is built in such a way that, when it is powered ON, it will move on the path defined in the program. When it encounters any obstacle, depending on the conditions applied in the program the robot proceeds with further motion and then the robot picks up the garbage.
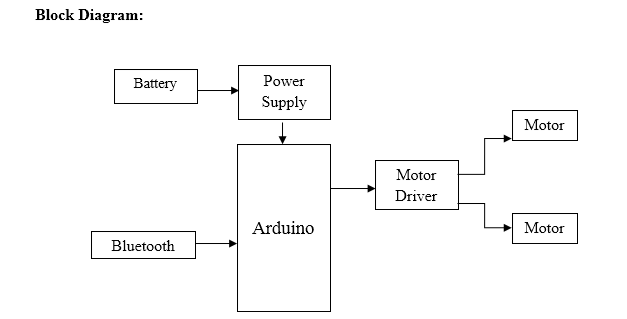
Keywords: Arduino uno, Bluetooth, Battery, motor driver, DC motor, power supply
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware Requirements:
- Arduino uno
- Bluetooth
- Motor driver
- DC motor
- Battery
- Power supply
Software Requirements:
- Arduino IDE
- Fritzing
Learning Outcomes
- Arduino Pin diagram and Architecture
- How to install Arduino IDE Software
- Setting up and Installation procedures for Arduino IDE
- Introduction to Arduino IDE
- Commands in Embedded C
- How to install Libraries?
- Basic coding in Embedded C
- Working of Bluetooth
- How to interface Bluetooth with Arduino?
- Working of Motor driver
- How to Dc motors with Arduino?
- Working of LCD
- How to interface LCD with Arduino?
- About Project Development Life Cycle:
- Planning and Requirement Gathering (software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills
Demo Video

Request for Video
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.