Robotic Accident Prevention and Alert System for Visually Impaired
Objective
The main objective of this project is to create a robotic accident prevention and alert system tailored for visually impaired individuals, providing them with real-time assistance and warnings to navigate their environment safely and independently.
Abstract
This project proposes a walking aid cane robot for the elderly and visually impaired people, which is equipped with a walking stick and force sensors in the handlebar. The cane's movement is controlled based on the force applied to the handlebar, and an ultrasonic sensor detects obstacles and alerts the user through a speaker. A driver circuit manages the cane's movement, and a MEMS sensor detects falls, stopping the cane's movement. The user's location is updated via the cloud, and a message is sent to the caregiver. The system employs various sensors, including MEMS, Heartbeat sensor, force, and ultrasonic sensors, to enhance safety. The GSM module plays a crucial role in sending alerts and notifications to the user's mobile phone in case of potential danger. The use of these sensors is intended to provide real-time information about the stick holder's status and surroundings, detecting potential dangers and alerting the user in a timely manner to reduce accidents and injuries. GPS will give the real time location danger conditions GSM will send exact location.
Keywords: Accident Prevention, Alert System, Visually Impaired, Safety, Assistive TechnologyNOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
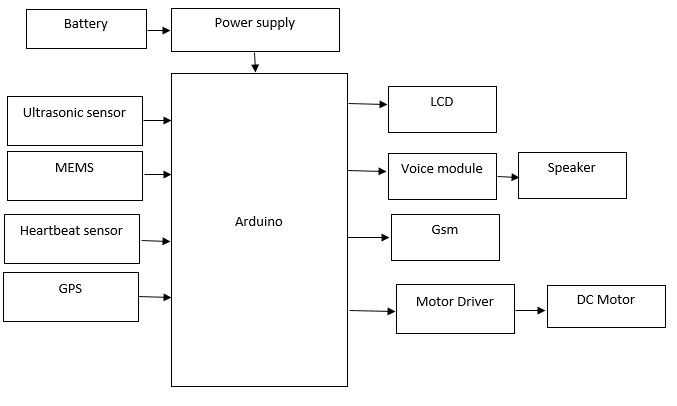
Specifications
Hardware Requirements:
- Arduino
- MEMS
- Ultrasonic sensor
- Heartbeat Sensor
- GPS
- LCD
- GSM
- power supply Board
- Battery
- Voice module
- Speakers
- Motor Driver
- Dc motor
Software Requirements:
- Arduino IDE
Learning Outcomes
- Arduino pin diagram and architecture
- How to install Arduino IDE software
- Setting up and installation procedure for Arduino
- Introduction to Arduino IDE
- Basic coding in Arduino IDE
- Working of LCD
- Interface LCD with Arduino ?
- Working of MEMS
- Interface MEMS with Arduino ?
- Working of ultrasonic sensor
- Working of Heartbeat sensor
- Working of GSM & GPS
- Interface GSM & GPS with Arduino ?
- Working of power supply
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.