IoT Based on-the-fly Visual Defect Detection in Railway Tracks
Objective
The main aim of this project is to makes inspection faster and does not congest the cloud with unnecessary data.
Abstract
Railway transportation requires constant inspections and immediate maintenance to ensure public safety. Traditional manual inspections are not only time consuming, and expensive, but the accuracy of defect detection is also subjected to human expertise and efficiency at the time of inspection. Computing and Robotics offer automated IOT based solutions where robots could be deployed on rail-tracks and hard to reach areas, and controlled from control rooms to provide faster inspection. In this project, robot will go on railway track and ultrasonic sensor is used for detecting the defect in track. If any defect is detected it will send the location on cloud. The system provides ultrasonic sensor for defect detection, cloud storage of information that consist of location of the defected railway tracks, and robot localization within a range of 3-6 inches. The proposed system utilizes state of the art Machine Learning system and obtained from the tracks in order to classify them as normal or suspicious. Such locations are then marked and more careful inspection can be performed by a dedicated operator with very few locations to inspect (as opposed to the full track).
Keywords: Rail track inspection, Arduino Uno, ultrasonic sensor, IR sensor, robot,GPS
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
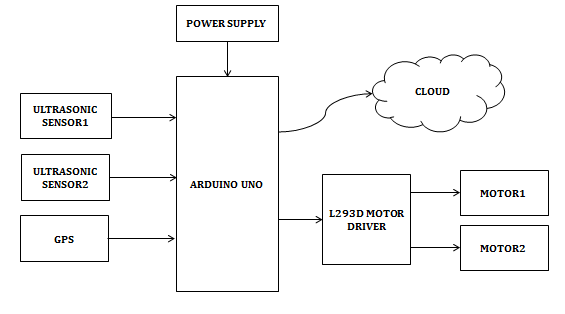
Block Diagram
Specifications
Hardware Requirements:
- ARDUINO UNO
- GPS
- Ultrasonic Sensor
- Motor
- Motor driver
- Transformer
- Power Supply
- Connecting wires
Software Requirements:
- ARDUINO IDE
- Embedded C
- Frizzing
- Third party server
Learning Outcomes
- Arduino UNO Pin diagram and Architecture
- How to install arduino IDE Software
- Setting up and Installation procedures for Arduino UNO
- Introduction to Arduino IDE
- Commands in Arduino
- How to install Libraries?
- Basic coding in arduino.
- What is Ultrasonic Sensor?
- How to interface Ultrasonic Sensor with arduino?
- What is motor driver?
- How to interface motor driver with arduino?
- What is DC motor?
- How to interface DC motor with arduino?
- What is GPS?
- How to interface GPS with Arduino?
- What is transformer?
- What is power supply?
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools. ,
- Solution providing for real time problems,
- Working with team/ individual,
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills
Learning outcomes:
- Arduino UNO Pin diagram and Architecture
- How to install arduino IDE Software
- Setting up and Installation procedures for Arduino UNO
- Introduction to Arduino IDE
- Commands in Arduino
- How to install Libraries?
- Basic coding in arduino.
- What is Ultrasonic Sensor?
- How to interface Ultrasonic Sensor with arduino?
- What is motor driver?
- How to interface motor driver with arduino?
- What is DC motor?
- How to interface DC motor with arduino?
- What is GPS?
- How to interface GPS with Arduino?
- What is transformer?
- What is power supply?
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools. ,
- Solution providing for real time problems,
- Working with team/ individual,
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.