Human Andro system
Objective
The human andro system is fundamental problem in robot development. Namely, not only the behaviour but also the appearance of a robot influences human-robot interaction. There is, however, no project approach to tackling this problem. In order to solve the problem, we have developed an android robot that has similar appearance as humans and several actuators generating micro behaviors . This project proposes a new direction based on the android robot.
Abstract
In recent years, there has been much research and development of intelligent partner robots that can interact with humans in daily life, such as Sony AIBO and Honda ASIMO. In this communication between the robots and humans is emphasized in contrast to industrial robots performing specialized tasks. Meanwhile, the intelligence of a robot is a subjective phenomenon that emerges during human-robot interaction. It is, therefore, indispensable to reveal a principle of human-robot and human-human communication, that is, a principle of interaction for developing a partner robot and realizing its intelligence.
Evaluated how the behaviour of their robots affects human-robot interaction by observing their interaction. These works have gradually revealed the effects of robot behaviour on human-robot interaction. There is, however, a possibility that robotic appearance distorts our interpretation of its behaviour. The appearance of the robot is essentially one of its functions; therefore, the effect of appearance must be evaluated independently. It is generally difficult to isolate the effects of a robot’s behaviour from those of the robot’s appearance which is dissimilar from humans. One way to discriminate is developing a robot whose appearance is the same as humans.
Keywords: Andro System, Communications, Robots, Appearances.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
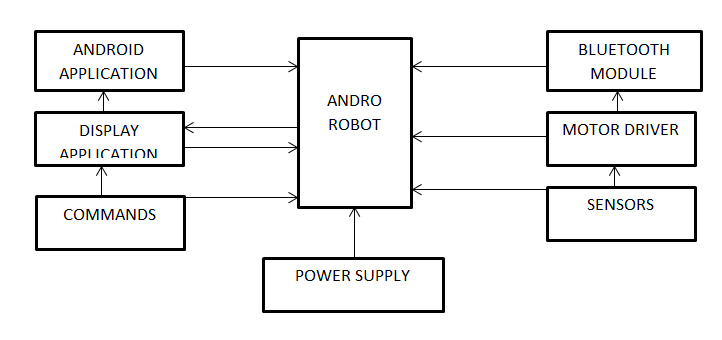
Block Diagram
Specifications
SOFTWARE SPECIFICATIONS
- Operating System: Windows and Android
- SDK IDE: Android Studio 3.3
- Virtual Emulator: Nexus Pixel 2
- Programming Language: Java
- Front End: Xml
- Server scripting Language: PHP
- Database: MySQL
HARDWARE SPECIFICATIONS
- CPU type: Intel i7
- Ram size: 16 GB
- Hard disk capacity:1TB
- Monitor type: 15 Inch color monitor
- Keyboard type: Internet keyboard
- Mobile: Android
Learning Outcomes
- About Android Studio.
- About java.
- About volley servers.
- About Fragments.
- About manifest.
- About dependencies.
- About griddle builds.
- About uses and permissions.
- About Edit texts.
- About Relative layout.
- About Linear layout.
- About image views.
- About Libraries.
- About Resource layout.
- About Activities.
- About Layouts.
- About Adapters.
- About Different types of Buttons.
- About XML code.
- About how to send notifications.
- About Views.
- About JSON objects.
- About Intents.
- About put extra params to pass the values.
- About PHP.
- About SQL.
- About Database.
- About data base tables.
- About How to store data in database.
- About andro robot.
- About how to use the andro robot.
- About how the communicate andro robots.
- Project Development Skills:
- Problem analyzing skills.
- Problem solving skills.
- Creativity and imaginary skills.
- Programming skills.
- Deployment.
- Testing skills.
- Debugging skills.
- Project presentation skills.
- Thesis writing skills.



Related Projects
 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.