Head-Motion Controlled Wheelchair
Objective
The objective of this project is used to control the wheel chair based on head movements
Abstract
An electric wheelchair is propelled by means of an electric motor rather than manually. Persons with mobility impairments often traditionally use these. Quadriplegics are one of the many physically disabled people that require such electric wheelchairs. They have paralysis of all four limbs and the torso that may be caused due to spinal cord injuries, strokes or cerebral palsy. They have no control over their hand movements and cannot grasp things or perform motions that might allow them independence over their movements. They only have control over their head motions. For this reason, a head-motion controlled wheelchair would provide them with the flexibility of signalled directions. The tilting movements of the head in the four directions-forward, backward, right or left-would cause the wheelchair to move in the signalled directions. This project represents a novel approach to develop a head-motion controlled wheelchair.
Keywords: Raspberry Pi, Arduino, Zigbee Module, Web camera, Ultrasonic Sensor, Head Motion Recognition
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
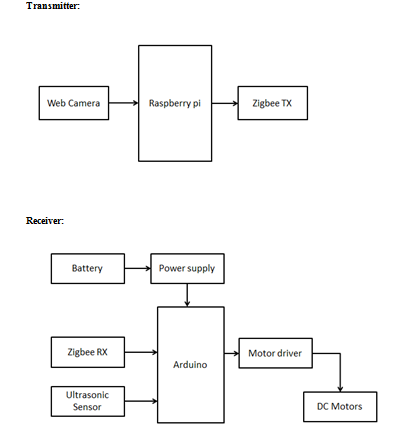
Block Diagram
Specifications
Hardware components:
- Raspberry pi
- Arduino
- Ultrasonic Sensor
- Web Camera
- Motor driver
- DC motor
- Zigbee Module
Software requirements:
- PYTHON
- NOOBS
- Embedded C
- Arduino IDE
Learning Outcomes
- Raspberry pi pin diagram and architecture
- How to install NOOBS software
- Setting up and installation procedure for Raspberry Pi
- How to connect Raspberry Pi through VNC viewer
- Introduction to Python3 IDE
- Commands in Python
- Basic coding in Python
- Working on Web Camera
- Interface Web Camera with Raspberry Pi?
- Arduino pin diagram and architecture
- How to install Arduino IDE software
- Setting up and installation procedure for Arduino
- Introduction to Arduino IDE
- Basic coding in Arduino IDE
- Working of Ultrasonic sensor
- Interface Ultrasonic sensor with Arduino?
- Working of Motor driver and DC Motor
- Interface Motor driver and DC Motor with Arduino?
- About Project Development Life Cycle:
- Planning and Requirement Gathering((Hardware components, etc.,)
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Testing skills
- presentation skills
- Thesis writing skills
Demo Video

Request for Video
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.