Development Of Data Acquisition Robot For Toxic Environmental Monitoring Using WSN
Also Available Domains Robotics|ARM7|Raspberry pi
Objective
The main objective of the project is to develop and implement Data Acquisition Robot for industrial applications that detect the damages inside the oil pipe which cannot be detected by human beings as there is very heavy temperature, pressure and toxic gases inside it.
Abstract
For the reason of having problem while unloading the material in congested place or at the specific place as appropriate for work. Our survey in the regards of several construction sites, revealed facts that most of the difficulty comes under unloading. So here we are using dumper. A dumper is a vehicle use for carrying various materials from one place to another and dump to a specific place. A Dumper is a vehicle designed for carrying bulk material, often on building sites such gravels, sand, debris or rubbles.
Dumper are distinguished from tippler trucks by configuration: a dumper is usually an open 4- wheeled vehicle, has its cab in front of the load. A typical dump truck is equipped with an open-box bed, which is hinged at the rear and equipped with motor to lift the front, allowing the material in the bed to be deposited ("dumped") on the ground behind the truck at the site of delivery.
The existing dump truck drop the material in backside only. But there is a problem when we want to put the material in right and left side of tippler at congested place or area. So In this project, we made the dumper which can unload the material in the three direction (within 180 ̊) i.e. back, right and left with the help of motor.
Keywords: Multi-directional dumping, Robotics, Bluetooth control, Mechatronics, Arduino UNO.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
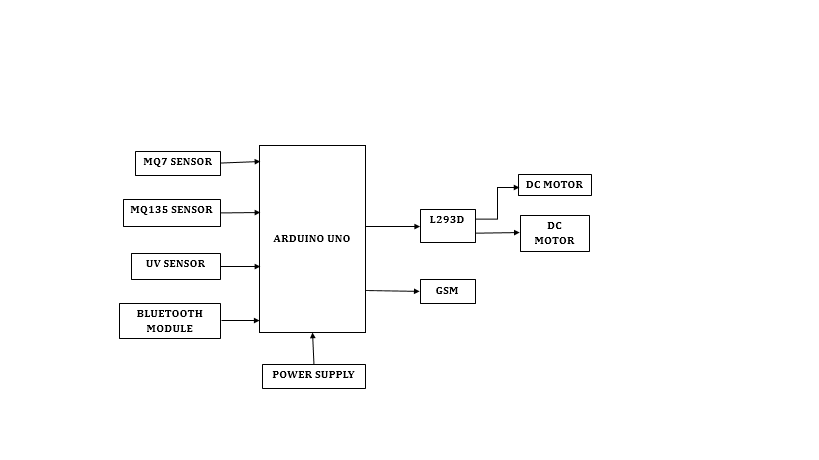
Block Diagram
Specifications
Hardware Requirements:
- Arduino Uno
- 12V Battery
- Power jack cable
- Connecting wires
- Bluetooth module
- MQ7 sensor
- MQ135 sensor
- UV sensor
- GSM Module
- L293D Motor driver
- DC motor-2
Software Requirements:
- Arduino IDE
- Embedded C
- Fritzing
Learning Outcomes
- Arduino UNO Pin diagram and Architecture
- How to install arduino IDE Software
- Setting up and Installation procedures for Arduino UNO
- Introduction to Arduino IDE
- Commands in Arduino
- How to install Libraries?
- Basic coding in arduino
- Working of MQ7 sensor
- How to interface MQ7 sensor with arduino?
- Working of MQ135 sensor
- How to interface MQ135 sensor with arduino?
- How to interface UV sensor with arduino?
- Introduction to Serial Communication
- Working of GSM
- How to interface GSM module with arduino?
- Working of Bluetooth module
- How to interface Bluetooth module with arduino?
- Working of l293d
- How to interface l293d with arduino?
- How to interface DC motor with arduino
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems,
- Working with team/ individual,
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.