Arduino Control Landmine Detection Robot
Objective
The main objective of this project is to detect the landmine using robot by using the sensor like ultrasonic sensor, metal detector and give alert to the user.
Abstract
The work proposed to have a proto type model for land-mine detection robot (LDR), which can be operated remotely using two Zigbee transceivers. The motion of the dc motor which is attached to the robot is controlled from X-CTU Software terminal on the PC using one Zigbee transceiver. The safety of humans was addressed and designed robot with special range sensors like ultrasonic sensor employed to avoid obstacles. A Global Positioning System (GPS) sensor is employed, which identifies and broadcasts the present location of the robot, whenever landmine is detected. Arduino microcontroller is employed in this robot with application code. The robot system is embedded with metal detector capable of sensing the landmine and buzzer from producing a warning alarm to the nearby personnel in that area. . So that it can detects the armed vehicle drive in the enemy territory. The locomotion of the robot is carried out by the DC motor. The robot is interfaced with the PC by deploying a Zigbee device. Fabrication of this project prototype was done using lightweight robot chassis.
Keywords: Robot mechanism, ultrasonic sensor, metal detector, Arduino microcontroller.
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
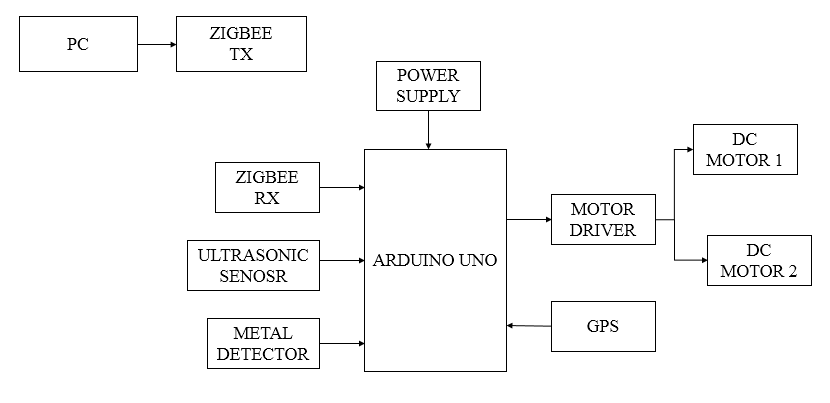
Specifications
- Arduino uno r3
- Atmega328p microcontroller
- Neo-6m gps chip
- Ultrasonic sensor
- Buzzer
- DC motor
- Zigbee transceiver
- L293d motor driver ic
- LJ12a3-4-Z-BY-metal detector sensor
- Power supply
Software Requirements:
- Arduino IDE
- X-CTU software
- Embedded C
- Fritzing
Learning Outcomes
- Arduino UNO Pin diagram and Architecture
- How to install Arduino IDE
- How to use X-CTU SOFTWARE
- Basic coding in Arduino IDE
- Ultrasonic sensor interfacing with Arduino.
- Zigbee interfacing with Arduino
- GPS interfacing with Arduino
- GSM Technology and interfacing GSM with Raspberry Pi
- DC motor interfacing Arduino through motor Driver
- About Project Development Life Cycle:
- Planning and Requirement Gathering( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

1st Floor, 1-5-558, 2nd St, Balaji Colony, Tirupati, Andhra Pradesh 517502.
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.
