An Indoor Autonomous Guided Vehicle Based On Electromagnetic Tracking And Positioning I-beacon
Also Available Domains WSN|Robotics|Android|Embedded applications
Abstract
Vehicle navigation systems are emerging technologies developed on the basis of Global Positioning System(GPS).In view of the problem that the GPS cannot provide satisfactory indoor positioning results making the autonomous navigation system of the vehicle unable to pinpoint the location indoors, an indoor autonomous guided vehicle based on MCU is designed. Indoor autonomous guided transport vehicles can be used for indoor sorting and handling of materials, and can greatly improve the speed. Under the control of the scheduled command to improve the sorting and handling quality and reduce the error rate, they can effectively improve the work effectiveness. The autonomous Guided Vehicle travels on a predetermined electromagnetic route laid with wires. Its coordinates are obtained by using the low-power Bluetooth I-Beacon module. After receiving the coordinates of the destination, the shortest path is calculated by the Floyd algorithm to realize the autonomous navigation. This project will elaborate the design concept of the autonomous guided vehicle from five parts: the electromagnetic sensor design, the electromagnetic guide line design, the motor drive design, the electromagnetic tracking scheme, and the low-power Bluetooth I-Beacon module positioning scheme
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
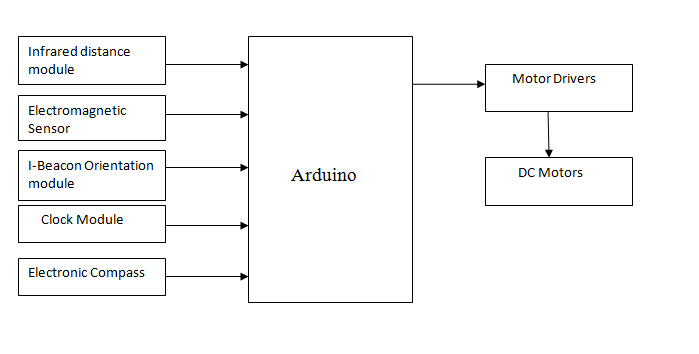
Block Diagram
Specifications
Hardware Requirements:
- Arduino.
- Infared distance module.
- Electro magnetic sensor.
- i-beacon orientation module.
- Clock module.
- Electronic compass.
- Motor drivers.
- Dc motors.
- Power supply
Software Requirements:
- Arduino IDE
- Embedded C
Learning Outcomes
- Micro controller pin diagram and architecture
- How to install Arduino IDE software
- Setting up and installation procedure for Arduino
- Introduction to Arduino IDE
- Basic coding in Arduino IDE
- About Project Development Life Cycle:
- Planning and Requirement Gathering ((Hardware components, etc.,)
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Testing skills
- presentation skills
- Thesis writing skills



 Paper Publishing
Paper Publishing

Request Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.