Accident Prevention System in Hilly Areas
Objective
The main objective of this project is to reducing the risk of driving vehicle in the terrain region with hairpin bends and steep curves.
Abstract
In hilly regions, there will be a number of curves and hairpin bends. The roadway is one of the often-used modes of transport in these regions. Accident rate and death rate in hilly regions are increasing day by day. The roads in this region will definitely have bends and steep curves; hence, it is difficult to see the vehicles coming from the opposite side. The proposed system aims in reducing the risk of driving vehicle in the terrain region with hairpin bends and steep curves. The deployed controller with ultrasonic sensor senses the vehicle coming towards the bend and intimates it to the other side of the bend or curve; it gives three stages of LED alerts to the driver driving the vehicle from the opposite side of the hairpin bend or curve. It also senses the speed of the vehicle, if the vehicle speed is high, it will alert the drivers through the buzzer. These alerts will indirectly convey the drivers to slow down the speed of the vehicle.
The foremost focus of the proposed system is to prevent accidents for the drivers and passengers in order to decrease the death rates in hilly regions. This system also provides a way for analyzing the number of uphill and downhill vehicles in the hill stations by storing the data in the cloud. The analyzed data is be viewed over the internet through a web application. The web application serves as a traffic pattern analyzer for people who wish to travel by that road.
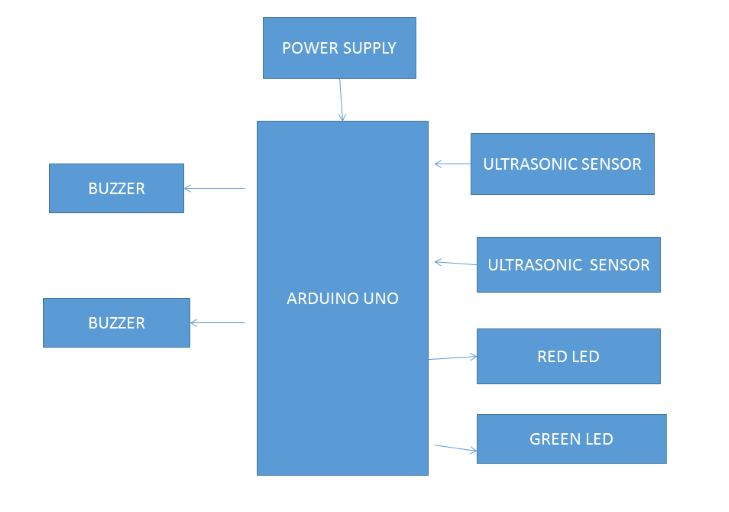
Keywords: Arduino uno, Power supply, Ultrasonic sensor, Red led, Green led, Buzzer
NOTE: Without the concern of our team, please don't submit to the college. This Abstract varies based on student requirements.
Block Diagram
Specifications
Hardware Requirements:
- Arduino uno
- Power supply Board
- 12V Adapter
- Ultrasonic sensor
- Red led
- Green led
- Buzzer
Software Requirements:
- Arduino IDE
- Fritzing
Learning Outcomes
- Arduino pin diagram and architecture.
- How to install Arduino IDE software
- Setting up and installation procedure for Arduino
- Introduction to Arduino IDE
- Basic coding in Arduino IDE
- Working of Buzzer
- Working of Ultrasonic sensor
- Working of Red led
- How to interface Buzzer with arduino uno?
- How to interface ultrasonic sensor with Arduino uno?
- How to interface Green led with arduino uno?
- How to interface Power supply with arduino uno?
- How to interface Red led with arduino uno?
- Introduction to IOT
- IOT Architecture
- IOT – Applications and Scope
- How to send data from arduino uno to an IOT platform?
- About Project Development Life Cycle:
- Planning and Requirement Gathering(( software’s, Tools, Hardware components, etc.,)
- Schematic preparation
- Code development and debugging
- Hardware development and debugging
- Development of the Project and Output testing
- Practical exposure to:
- Hardware and software tools.
- Solution providing for real time problems.
- Working with team/ individual.
- Work on Creative ideas.
- Project development Skills
- Problem analyzing skills
- Problem solving skills
- Creativity and imaginary skills
- Programming skills
- Deployment
- Testing skills
- Debugging skills
- Project presentation skills
- Thesis writing skills
Demo Video

Request for Video
 Paper Publishing
Paper PublishingRequest Call Back
Would you like to receive a free callback now?
Choose the best time for callback:
Leave your message and we will contact you as soon as possible

6-2-85/B, Old Maternity Hospital Road, Thyagaraja Nagar, Tirupati, Andhra Pradesh – 517501
+91 9030333433
+91 9393939065
0877-2261612

Disclaimer - Takeoff Edu Group Projects are not associated or affiliated with IEEE in any way. The IEEE Projects mentioned here are mentioned in the context of student projects, whose ideas are derived from IEEE publications, not projects of or by IEEE.